Using AMSR-E data, De Groeve et al. (2006) developed a method for detecting
major floods on a global basis in a systematic, timely and impartial way
appropriate for humanitarian response. more...
Brakenridge et al (2005) demonstrated that AMSR-E can measure river discharge
changes in various climatic conditions. The methodology uses the brightness
temperature at 36.5GHz H-polarization during the descending (night) orbit of
AMSR-E with a footprint size of approximately 8x12km2 and an average revisit
time at 1 day. Brightness temperature is related to the physical temperature
T and the emissivity ε of an object:  . Due to the different thermal inertia
and emission properties of land and water the observed microwave radiation in
general accounts for a lower brightness temperature values for water
(Tb,water) and higher for land (Tb,land >
Tb,water). Since the each observation of the satellite (or
pixel) covers a relatively large area of 8x12km2, the observed brightness
temperature is mostly composed of both water and land values, in proportion to
the relative area of water (w) and land (1 – w) in the pixel.
. Due to the different thermal inertia
and emission properties of land and water the observed microwave radiation in
general accounts for a lower brightness temperature values for water
(Tb,water) and higher for land (Tb,land >
Tb,water). Since the each observation of the satellite (or
pixel) covers a relatively large area of 8x12km2, the observed brightness
temperature is mostly composed of both water and land values, in proportion to
the relative area of water (w) and land (1 – w) in the pixel.

If the physical temperature remains constant, changes in brightness
temperature will be related to changes in water surface extent in the pixel.
However, in spite of the great radiation dissimilarity of water and land cover,
the raw brightness temperature observations cannot be used to reliably detect
changes in surface water area. This is because brightness temperature
(Tb) measures are influenced by other factors such as physical
temperature, differences in emissivity and atmospheric moisture. While the
relative contribution of these factors cannot be measured, the authors assume
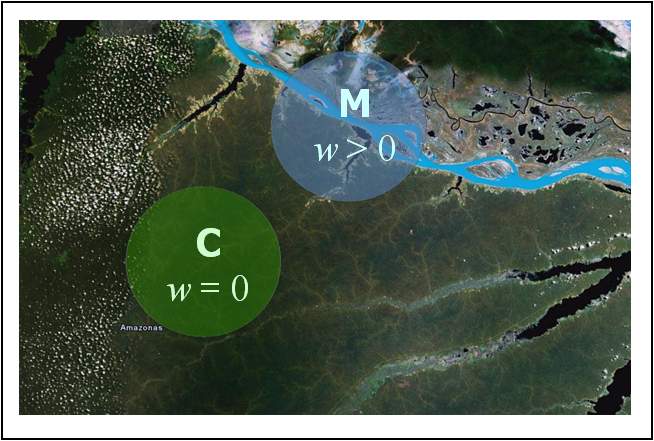
them to be constant over a larger area. As shown in equation 2, the ratio
between two nearby pixel values is a function of w alone. Therefore, by
comparing a “wet pixel” received over a river channel of a potential inundation
location (w > 0) with a “dry pixel” without water cover (w = 0)
the mentioned noise factors can be reduced. The brightness temperature values of
the measurement/wet signal are divided by the calibration/dry observations,
referred to as M/C ratio or signal s.

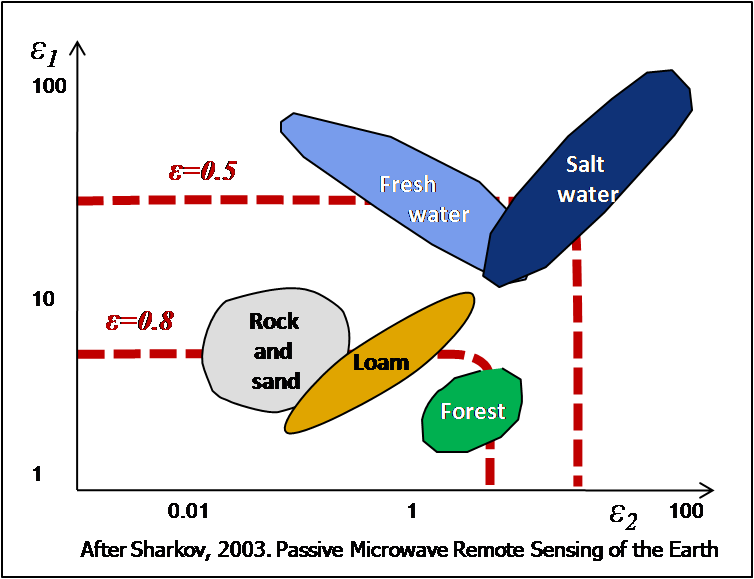 Typically, emissivity values of water
are around 0.5 and of most minerals between 0.75 and 0.95 (Rees, 1990). When
calibration pixels are chosen carefully (without any open water), s
varies between 1 (w = 0, no water) and 0.3 to 0.5 (w = 1, fully
flooded) depending on the mineral content of the soil. In a time series,
s is expected to vary with changes in water surface. Anomalies of the
signal s can be correlated well with flood events. Moreover, as
demonstrated by Brakenridge et al. (2007), if gauging data is available
for the site, the signal can be calibrated to staging height with accurate
results.
Typically, emissivity values of water
are around 0.5 and of most minerals between 0.75 and 0.95 (Rees, 1990). When
calibration pixels are chosen carefully (without any open water), s
varies between 1 (w = 0, no water) and 0.3 to 0.5 (w = 1, fully
flooded) depending on the mineral content of the soil. In a time series,
s is expected to vary with changes in water surface. Anomalies of the
signal s can be correlated well with flood events. Moreover, as
demonstrated by Brakenridge et al. (2007), if gauging data is available
for the site, the signal can be calibrated to staging height with accurate
results.
De Groeve and Riva (2009) showed that a local maximum in a moving window can
be used for the calibration value, avoiding the need for manual selection of the
calibration site. This finding makes the method applicable in any arbitrary area
on Earth, rather than in carefully chosen sites, opening the way for a global
flood detection system.
The methodology has been tested with AMSR-E data and TRMM data. However, TRMM
data is only available up to latitudes of 50 degrees. In order to have global
coverage, AMSR-E data is used.
The data used is the Level 1 brightness temperature at 36.5GHz H-polarization
during the descending (night) orbit of AMSR-E with a footprint size of
approximately 8x12km2 and an average revisit time of 2 days south of 30 degrees
and 1 day north of 30 degrees latitude. The swath data is available about 4h
after acquisition by the satellite from the Japanese Space Agency (Jaxa).
 The data is downloaded at JRC, resampled
(using a nearest neighbor approach) and mosaicked in daily grids with global
coverage (see De Groeve and Riva, 2009 for a detailed description of the data
processing steps). The result is global grid (4000 by 2000 pixels) of brightness
temperature data, available by date. The data of the current day is recalculated
whenever new swath data is available.
The data is downloaded at JRC, resampled
(using a nearest neighbor approach) and mosaicked in daily grids with global
coverage (see De Groeve and Riva, 2009 for a detailed description of the data
processing steps). The result is global grid (4000 by 2000 pixels) of brightness
temperature data, available by date. The data of the current day is recalculated
whenever new swath data is available.
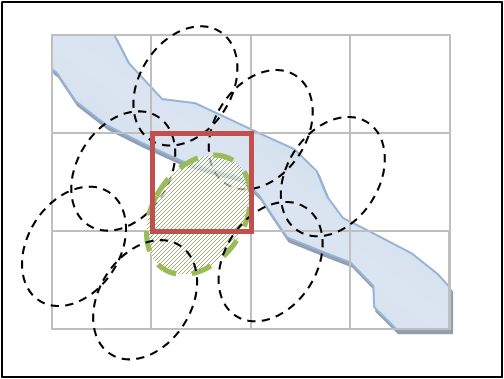
Flood signals are calculated as soon as new data is available. Using the
local 95 percentile in a window of 7x7 pixels as the calibration temperature,
the signal (M/C value) is calculated for each pixel, resulting in a “signal
image”.
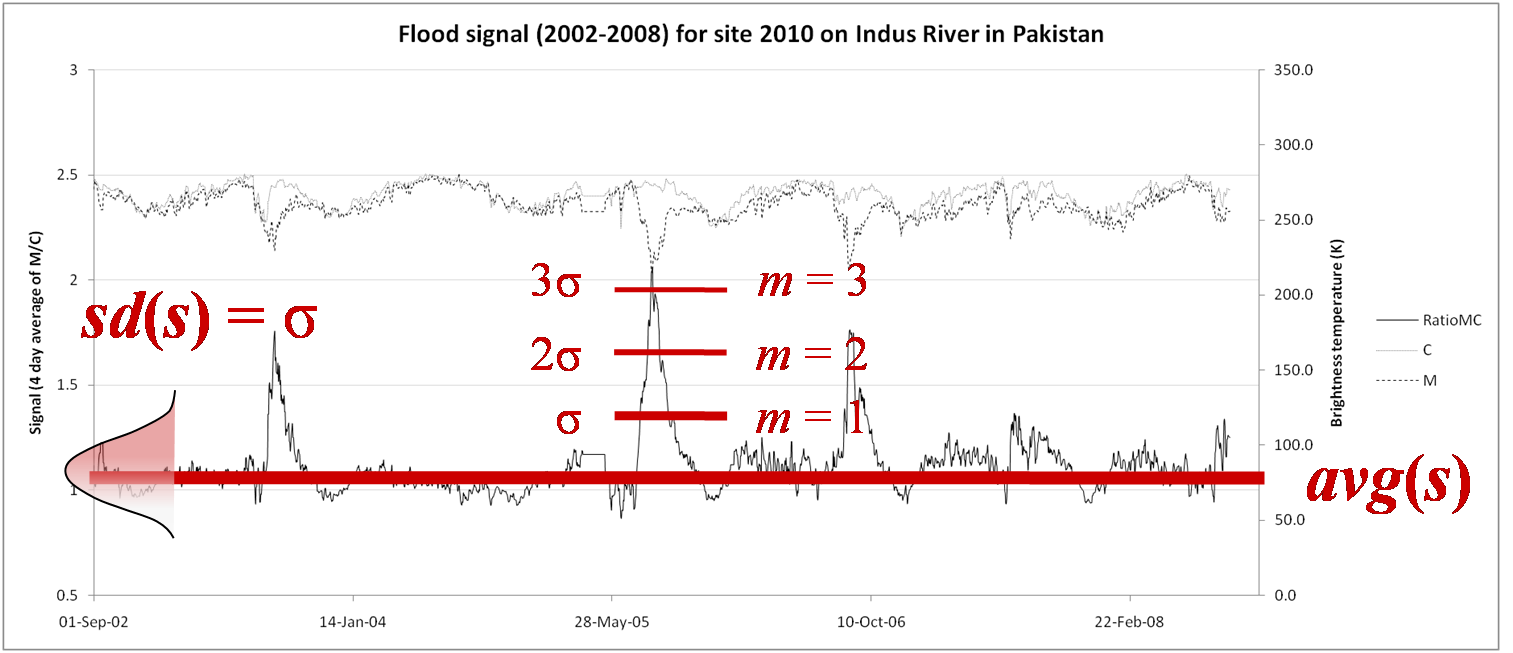
In order to distinguish between areas with permanent water (e.g. lakes or
wide rivers) and areas with flood waters, we look at change in flood signal over
time. Based on a time series of 7 years (going back to June 2002 when the
satellite was launched), anomalies are automatically detected using a method
described in De Groeve et al. (2006). Since lower M/C signals generally
accounts for increased water coverage, extreme events, or major floods, should
represent negative anomalies in the time series of a given site. In order to
detect anomalies, they first determined the reference value for normal flow,
which varies for each site based on the local emissivity properties and river
geometry. This reference value was calculated as the average M/C value for the
site since the launch of the satellite. They then set flood level thresholds
based on the statistics of the time series. Flood magnitude was defined as the
number of standard deviations (sd) from the mean (avg):
 <
<
Floods appear typically for anomalies of 2 (small and regular flood) or 4
(large and unusual flood). This is equivalent to probabilities of 2.1% and
0.003%.
With the signal images, a similar method can be applied. However, because no
calibration site is necessary, the magnitude can be calculated for any arbitrary
point or area. To observe an area, we define an observation area as a collection
of pixels. For these observation areas, a set of quantities are calculated
including: average magnitude, maximum magnitude, number (an percentage) of
pixels exceeding magnitude 2 and number (and percentage) of pixels exceeding
magnitude 4.
All these quantities are indicative of the size of the flood in the
observation area. The average or maximum magnitude is an objective measure of
the degree of flooding, while the pixel count is a measure of the extent of the
floods. Since each pixel represents an area of 100km2, the “number of pixels
exceeding magnitude 4” are an approximate measurement of the flooded area
(number of pixels x 100km2).
