There may be four map products available here for each flood event:
The automated product: This map may incorporate 250 m spatial resolution MODIS Rapid Response Subset data: provided by NASA's LANCE System. It most commonly incorporates data from from an automated MODIS flood processor using LANCE reflectance data. See appropriate Surface Water Record display for more information and technical description. *Once automation is implemented, the display updates daily using a composite 14-day MODIS NRT product incorporating today's data and 13 days prior. This provides the needed spatial coverage in many areas. In very cloudy regions, however, even the 14 day accumulation period may not suffice to provide complete coverage.
Manual Flood Mapping from MODIS: When the automated processor is not detecting water due to sustained cloud cover, individual MODIS scenes and operator-assisted mapping can provide better results. This is because the automated processor relies on a filter using 3-day/6-image data sets to remove moving cloud shadow noise. The following method of manual water/land classification and map production from single image Rapid Response Subset data is effective: a) The subset geotiff data, bands 721 composites, are used. b) A band math/ratio and threshold approach is applied within Envi™ as follows: 1) Band math: "(float(b2) gt 200 ) or (((float(b1)+1)/(float(b2)+80)) gt .7) or float(b3) gt 17", where b2 = band 1; b3 = band 2; b1 = band 3 of the three channel RGB (bands 1,2,3) geotiff files. 3) This produces a binary geotif file with 0, black, as water, and 1, white, as land. 4) To remove cloud shadows ,if necessary, two images closely spaced in time (within one day) are processed, the classification results added, and the results added. Water must retain values of 0. 5) A GIS polygon (.shp format) is then fit around the water pixels within Envi™.
Method of Sentinel 1 water/land classification and map production: 1) A matching "exact repeat" image pair is obtained from ESA's Sentinel 1 Data Hub: before flood and during flood. 2) The two SAR images are exactly co-registered. 3) A false color composite is created, with two of the RGB bands on the "during" image and one on the "before". 4) The color image is saved as a geotif file (see sample below). 5).A low pass convolution filter is applied, with a kernel size of 7, to smooth the image. 6) An isodata non-supervised classifier (Envi™) is run on the smoothed color image to produce 7-15 classes, three iterations. This commonly results in (class 1) "permanent" water, and (class 2) a "new water" class. 7) GIS .shp file polygons are fit around the combined class 1 and 2 pixels. 8)Within GIS software, the polygons are displayed over the tif image, and evident error polygons are manually deleted (these are most commonly terrain shadows in upland areas). This method is designed for rapid, operator-assisted transformation of SAR image data into water map information.
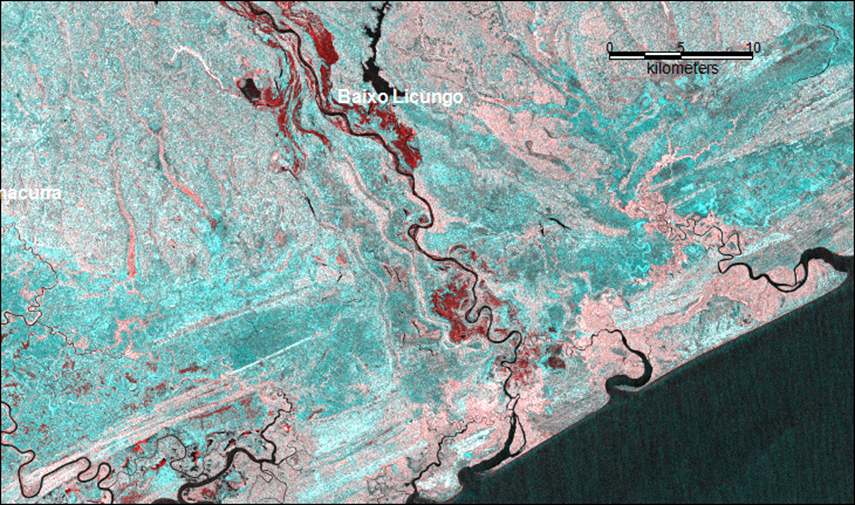
Sample, southern Mozambique. Red is flooding as recorded by lower backscatter in Jan. 11 Sentinel 1 SAR image, compared to previous image Dec. 24. Data courtesy of the European Space Agency
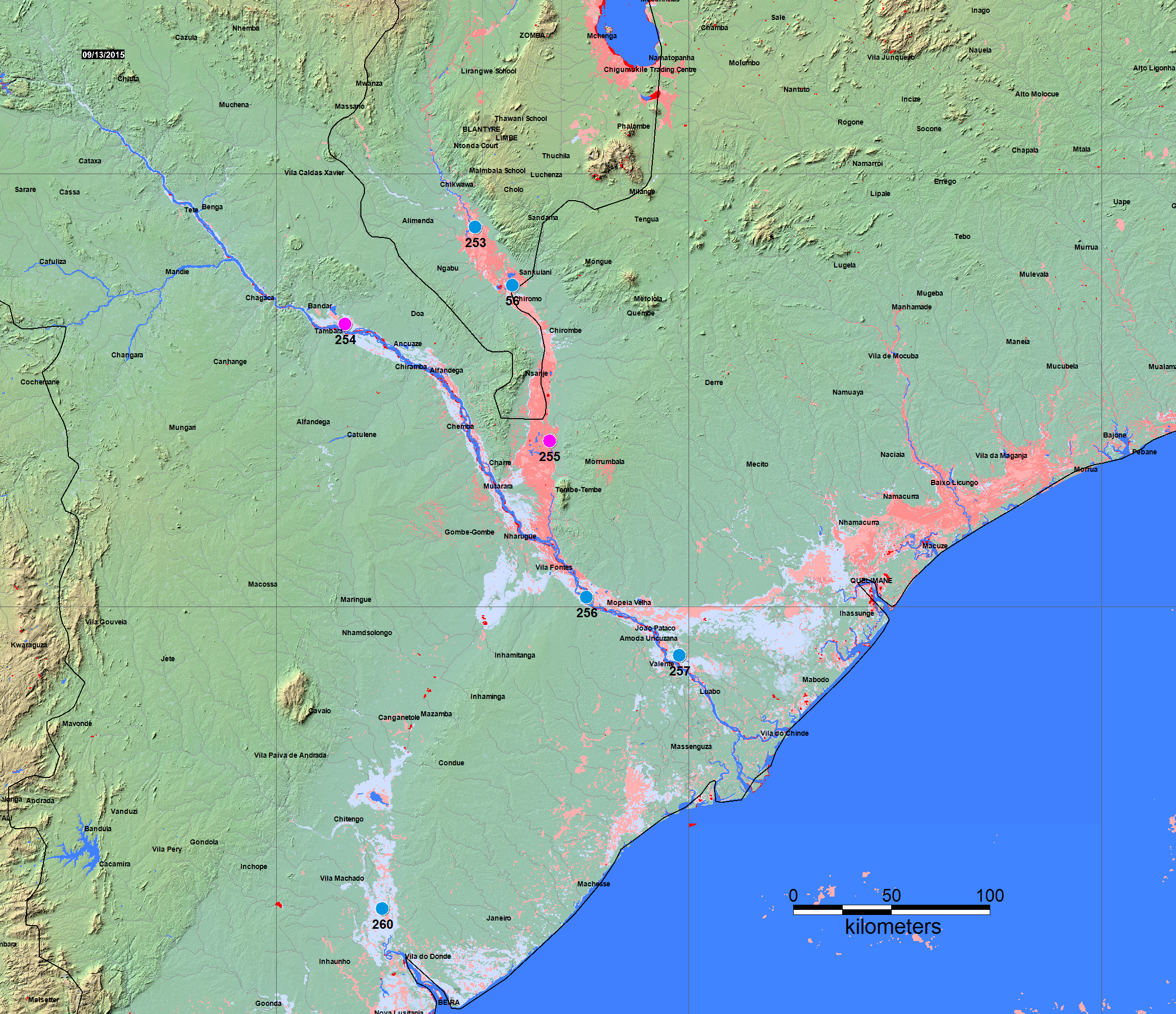
At selected locations, a time series of satellite microwave-based daily river discharge measurements are available. These define the estimated recurrence interval of mapped flooding. Click on the colored dots in the map below. Yellow dots: low flow (<20th percentile discharge for this date); Blue dots: normal flow; Purple dots: moderate flooding (>1.33 yr recurrence); Red, major flooding (> 5 yr recurrence). See River Watch Global Display for more information.
The River Watch output (representative displays below, for site #253) indicates the severity of the flood. At this site, the flooding is the greatest in the period of record, 1998-present.


A daily-updated 14-day accumulation .shp (and associated files) is named "current" and is provided in the MODISlance_2wkpro directory. The non-automated, MODIS-based .shp or MapInfo files are located here, together with any high resolution (Landsat 8, Sentinel 1, etc) .shp or MapInfo files.
There is commonly no "maximum flood extent" GIS polygon available. Instead, the display below (and associated .jpg file) and the matching Geotif file both record maximum flood extent: as the accumulated record of inundation gathered by multiple satellite images during the entire duration of flooding. The displays show a stack of GIS files. To assemble a single maximum flood extent GIS file (as of the date of your work): 1) download the latest 14-day accumulation (from the appropriate 2wkpro directory); 2) If need be, to extend back in time, obtain a set of the applicable 3-day MODIS gis files starting at the time of flood onset; 3) access any available files from the non-automated directory. These should allow replication of the display below and the Geotif by stacking the GIS layers. In some cases, you may need to edit out "false positive" noise introduced by cloud shadows misclassified as water. Or, download the Geotif: many remote sensing and GIS programs have the capability to fit GIS outlines to any group of pixels with a consistent RGB color. If need be, we can also customize the Geotiff output to facilitate your use.
As part of collaborations with other disaster response/satelllite mapping organizations, our data are provided through the above links and can be freely used, including for commercial purposes, under the terms of the Creative Commons Attribution 3.0 Unported License. The authors should be cited. As well, other organizations provide satellite-based GIS flood inundation data and such are sometimes incoporated in this display (and its matching Geotif). Copies of these data are also here. Links to the original data sources used in this particular map are: UNOSAT (Radarsat 2, January 21, 2015.
The MODIS water classification algorithm uses band 1 and 2 data at 250 m spatial resolution (coarse enough so that many small areas of water are included on "land" pixels, and, in some cases, land islands within "water" pixels. For single image-based (non-automated) water classification, errors of commission (false "water") include cloud shadows and terrain shadows. Manual editing sometimes is able to remove much of this noise. When more than one image closely spaced in time are available, the method described above also is used to more objectively remove cloud shadow noise. A major error of omission in all optical sensor-based flood mapping is cloud obcuration. The mapping in this case shows what was visible, but other areas of flooding may be occurring and not mapped. For this reason, however, this display accumulates all data over the course of the flooding, and thus provides the most complete spatial coverage possible.
Brakenridge, G.R., Slayback, D., Kettner, A.J., Policelli, F., De Groeve, T., and Cohen, S., 2014, Current Conditions and Maximum Flood Extent, 2015 Flooding in Malawi and Southern Mozambique, DFO Event 4219, http://floodobservatory.colorado.edu/Version3/2015Malawi4219.html.
Maps and associated data generated at DFO are available for public use and licensed under a Creative Commons Attribution 3.0 Unported License. Work is supported by the NASA Applications Program (point of contact: Dr. David Green). We acknowledge the Land Atmosphere Near-real time Capability for EOS (LANCE) system operated by NASA/GSFC, and the NASA funding support to the MODIS NRT flood processor at the Goddard Space Flight Center. Landsat 8 data are provided by the U.S. Geological Survey Hazards Data Distribution System. Landsat 8 is jointly managed by NASA and the United States Geological Survey.
Red: Flooding within past 14 days (MODIS automated product). Light Red: Flooded during this event, from earlier MODIS coverage or non-automated MODIS mapping. Darker Red: Flooded areas from high resolution Sentinel 1 or Landsat 8 data. Dark blue, Permanent water, February, 2000 (SWBD*). Very light blue, All flooding mapped by DFO since yr 2000.
*The Shuttle Water Boundary Data are at 90 m spatial resolution and provide a useful reference water.